Home
Popular
Featured
Best coubs
Stories
Who to follow
My likes
Bookmarks
Communities
Animals & Pets
Art & Design
Auto & Technique
Blogging
Cartoons
Celebrity
Dance
Fashion & Beauty
Food & Kitchen
Gaming
Live Pictures
Mashup
Memes
Movies & TV
Music
Nature & Travel
Science & Technology
Sports
Stand-up & Jokes
Anime
Dark Theme
Join our community
Create
Log in
Mobile apps
Terms of Service
Community rules
DMCA policy
Privacy policy
Navigation
Popular
Featured
Best coubs
Communities
Login
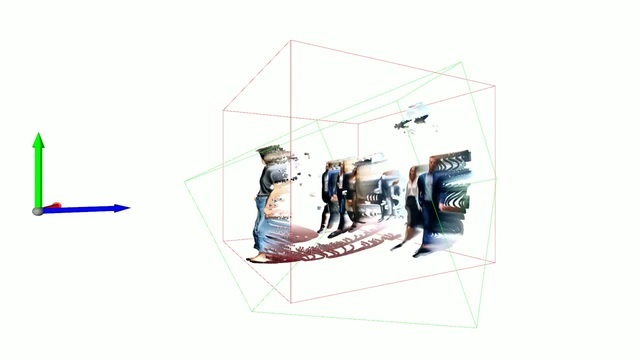
🤖👁️ ... 2D->3D monocular depth estimation